
La souplesse et la puissance des motorisations électriques embarquées permettent des mises en mouvements sans efforts et immédiates.
Finis les tours de reins !
Ainsi, le cobot 4A350 est le manipulateur de charge le plus efficace du marché !
Le traitement temps réel de la mesure de la force appliquée sur la gouverne rend l’usage simple, rassurant et efficace. Le manipulateur cobotique va là ou vous voulez en toute sécurité.
Paramétrer l’assistance au guidage ou des actions semi-automatiques du préhenseur, en fonction de l’endroit où se trouve le manipulateur équilibré permet d’optimiser le temps de manipulation et la productivité.
Le cobot 4A350 est le manipulateur de charge lourde pour l’usine du futur.
Cartésien, ce système dispose de 4 axes motorisés X, Y, Z et Thêta pour manipuler et déplacer des charges lourdes et volumineuses sans aucun effet d’inertie pour l’utilisateur.
La conduite du manipulateur de port de charge aérien 4A350 est sans effort, ergonomique et intuitive.
Le traitement temps réel de la mesure de la force appliquée sur la gouverne rend l’usage simple, rassurant et efficace.
La souplesse et la puissance des motorisations électriques embarquées permettent ainsi des mises en mouvements immédiates et fluides, tout en gardant un contrôle parfait des trajectoires.
À cet effet, la position des commandes est particulièrement étudiée pour dégager un angle de vue optimal pour l’opérateur.
Compatible avec toutes les technologies de préhenseur, le système de manipulation de charge 4A350 dispose aussi d’une détection de bonne prise des pièces.
La gouverne est équipée d’une fonction de présence main, pour autoriser la mise en mouvement et l’arrêt sûr (Sil2, PL D) des servomoteurs.
Ainsi des accélérations maitrisées permettent un positionnement rapide et précis de ce bras de manipulation, sans risque de perte de la charge. La position exacte est connue en temps réel grâce aux codeurs des axes et au réseau ETHERCAT embarqué.
On peut ainsi paramétrer des fonctions d’assistance au guidage ou des actions semi-automatiques du préhenseur, en fonction de l’endroit où se trouve le manipulateur aérien équilibreur.
Ceci permet d’optimiser le temps de manipulation et la productivité.
Cette aide à la manutention de charge est conforme à la directive machine 2006/42 CE.
| MINI | MAX | |
|---|---|---|
|
Longueur rails axe X |
4m |
30m |
|
Longeur rails axe Y |
4m |
12m
|
|
Course axe Z |
500mm |
2000mm
|
|
Hauteur H |
1500mm |
3000mm
|
|
Rotation axe Thêtra |
0° |
340° |
|
Accélération (X,Y,Z) |
1 m/s2 |
1 m/s2
|
|
Vitesse axes (X,Y,Z) |
1 m/s |
1 m/s
|
|
Poids du manipulateur |
400kg |
750kg
|
|
CMU |
50kg
|
300kg
|
|
Effort opérateur |
5 N |
< 50 N
|
|
Alimentation |
400V / 50Hz (5 kW maxi) |
|
Une bonne partie des activités professionnelles nécessitent à tout moment de manutentionner des charges afin d’alimenter mais aussi libérer les processus de production et de stockage. Dès que cela est techniquement possible et parfois aussi financièrement rentable, les entreprises tendent à mécaniser les manutentions. L’objectif étant de réduire les risques de TMS et d’accident de travail engendrés par la manutention manuelle de charge.
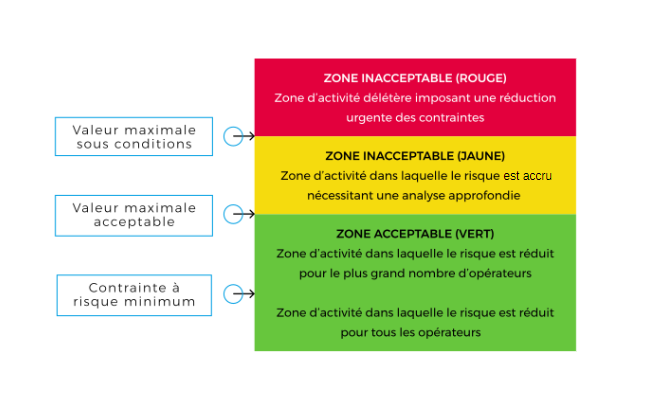
En 2017, 55% des accidents de travail étaient liés à des activités de manutention de charge.
90% des maladies professionnelles sont liées à des TMS. Les risques induits sont en général reportés dans le Document Unique de l’entreprise et traités au fur et à mesure du temps pour tendre vers le risque 0.
Pour ce qui est de la manutention des charges lourdes, le code du travail oblige l’entreprise à prendre des mesures collectives qui imposent souvent l’usage d’aides à la manutention. Ainsi nous allons retrouver le classique pont roulant ( 1 tonne et plus), la potence équipée de palan (250kg à 1 tonne), ou les différentes solutions de manipulateur de charge. Quand les cadences le permettent, il est en général fait usage d’un robot de manutention.
Mais dans la majeure partie des cas, l’usage de moyens conduits par une personne est le plus courant. Cependant, tous les moyens ne se valent pas.
Le poids à porter, les postures prises pour ce faire et la fréquence de répétition sont ce qu’on appelle les facteurs biomécaniques qui, malgré l’usage de moyens de manutention mécanisés, ont une influence énorme sur le risque résiduel de TMS.
Le choix de son système de manipulation de charge est donc primordial. Voici quelques éléments clé à prendre en compte.
Ainsi, la conformité à la directive machine Européenne des équipements est indispensable mais cela ne vaut que pour les équipements motorisés. En effet, les équipements mécaniques seulement mus par la force humaine ne sont pas soumis à cette directive. Ainsi il est bon de toujours procéder à une analyse de risque liés à l’usage particulier de l’équipement de levage envisagé.
Il est préférable que cette prestation soit réalisée par le constructeur de l’équipement d’aide à la manutention, mais il est bon que les préventeurs de l’entreprise soient impliqués. Une vérification de conformité CE est aussi une prestation envisageable de manière à s’assurer que l’équipement est bien conforme à la directive 2006/42/CE, encore appelée directive machine.
De plus comme tous les équipements de levage, l’équipement une fois installé doit faire l’objet d’une vérification de conformité de levage. Cette prestation doit être reconduite tous les ans.
Vous voulez savoir plus ? L’INRS a publié le document ED6339 « vérification règlementaire des appareils et équipements de levage » en 2019.
Afin d‘assurer une bonne ergonomie d’un poste de travail ou d’une activité, il est bon de se poser la question s’il est possible d’éviter les manutentions manuelles.
Entrée en application en 2009 la norme NFX 35-109 est la référence en France pour l’ergonomie des manipulations de charge.
Sa stricte application impose de ne pas dépasser 25 kg pour une charge portée à la main dans les meilleures conditions.
L’inertie des masses (charge portée+ partie mobile du moyen de levage) en mouvements complique et ralentit la conduite du moyen et provoque aussi des risques de collision avec l’environnement.
Effet de balancier d’une charge suspendue à un câble par exemple.
Enfin, l’ergonomie du moyen de conduite de l’équipement de levage est importante à prendre en compte.


Bon nombre de préventeurs vous reporteront que peu de temps après avoir mis en œuvre un projet d’aide à la manutention pour réduire les risque TMS, les utilisateurs interviewés se plaignent que l’équipement les ralentit ? Voire que la direction du site a remarqué que l’équipement n’est déjà plus utilisé ?
C’est parfois le cas quand une alternative manuelle existe : on va chercher le coup de main du collègue ponctuellement ! Bien sûr il sera toujours temps de réglementer la tâche et d’obliger les opérateurs à utiliser l’équipement d’aide. Quand la fréquence de manutention n’est pas importante, perdre une minute pour utiliser un équipement lent est encore acceptable.
Mais si, comme dans l’automobile on produit une pièce à la minute, chaque seconde perdue compte et peut impacter la productivité.
Plusieurs facteurs deviennent alors prédominants :
1/ L’inertie : à chaque mise en mouvement ou arrêt, si l’utilisateur doit se battre avec l’équipement pour le conduire, c’est un frein à l’usage, et cela oblige à faire des mouvements très lents. Un manipulateur entièrement motorisé n’a pas cet inconvénient ! on va donc beaucoup plus vite avec.
2/ La précision : l’approche pour effectuer la prise et/ou la dépose de la charge nécessite de la précision. Là encore l’inertie vient nous rappeler à l’ordre, mais de plus on veut éviter les mouvements intempestifs ou imprévus. C’est à ce moment qu’une fonctionnalité permise uniquement par un manipulateur cobotique entièrement motorisé est fondamentale : l’assistance au guidage est là pour vous aider.
En effet, pour aller vite en position et empêcher les mouvements intempestifs, il est possible d’ajouter une couche numérique d’assistance au guidage par-dessus la conduite du manipulateur équilibreur 4A350.
Finies les erreurs de trajectoire, les collisions avec les équipements juste adjacents qui, même si on ne casse rien, font perdre du temps à chaque fois !
Ainsi, la possibilité de gommer l’inertie d’une part, combiné avec une grande précision de conduite d’autre part, sont les garants d’une productivité optimale.
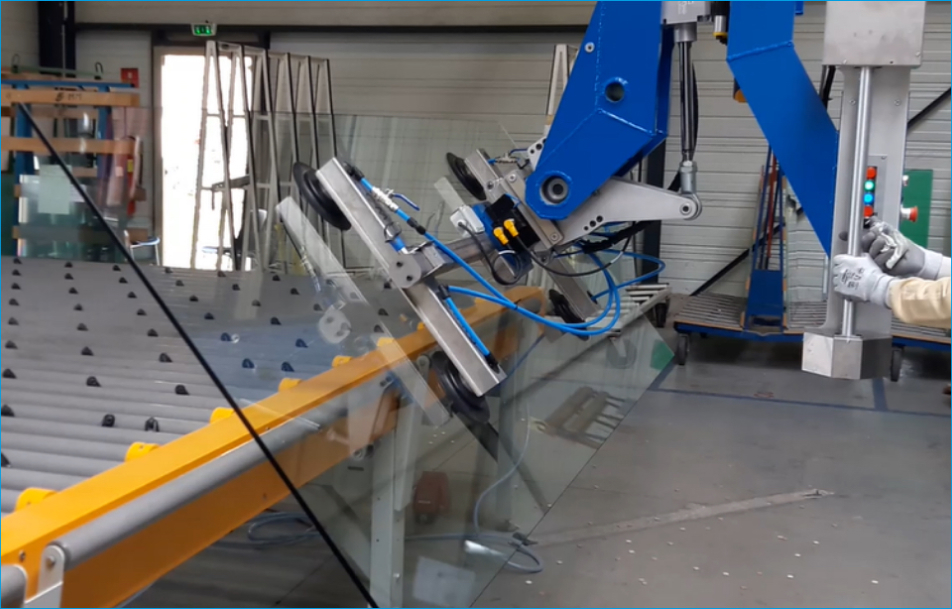
Chez RB3D, un manipulateur de charge est constitué d’une structure porteuse à laquelle est fixé un préhenseur qui va servir à prendre et tenir la ou les pièces que l’on veut déplacer. Compte tenu de la diversité des pièces à prendre et manipuler dans l’industrie, il faut en général adapter la technologie de préhension au besoin de l’application. Nous pouvons proposer un grand nombre de types de préhenseur : à ventouses ou à maintien mécanique, à pinces pneumatiques ou électriques ou même à base d’aimants. Notre bureau d’études dispose de la compétence et du savoir technique et sécurité pour concevoir et réaliser le préhenseur adapté à chaque situation, cette prestation fait partie de chaque projet client traité.
Les différentes parties d’un manipulateur équilibreur de type 4A350 peuvent avoir des niveaux de protection différents en fonction de leur exposition à la poussière ou aux projections d’eau. En tant que fabricant concepteur, nous adaptons la conception pour répondre à minima aux exigences standard de l’industrie : Indice de Protection IP45. Mais dans certains projets nous avons amélioré ce niveau de protection afin d’être mieux protégé, notamment pour certains sous ensemble plus exposés.
Il existe une version du bras de manipulation 4A350 conçue pour fonctionner en milieu agro-alimentaire. Plusieurs équipements de ce type sont en service avec succès depuis un certain nombre d’années. Poteaux en acier galvanisé, rails et structure en aluminium anodisé, armoire électrique et préhenseur en inox sont de rigueur dans ce type d’industrie. Notre conception prévoit aussi de ne pas avoir de zone de rétention et d’utiliser des lubrifiants compatibles agro-alimentaires.
