
| MINI | MAX | |
|---|---|---|
|
X-axis rail length |
4m |
30m |
|
Y-axis rail length |
4m |
12m
|
|
Z-axis travel |
500mm |
2000mm
|
|
Height H |
1500mm |
3000mm
|
|
Theta axis rotation |
0° |
340° |
|
Acceleration (X,Y,Z) |
1 m/s2 |
1 m/s2
|
|
Axis speed (X,Y,Z) |
1 m/s |
1 m/s
|
|
Manipulator weight |
400kg |
750kg
|
|
CMU |
50kg
|
300kg
|
|
Operating force |
5 N |
< 50 N
|
|
Power supply |
400V / 50Hz (5 kW maxi) |
|
A large part of professional activities require the handling of loads at all times in order to supply but also release the production and storage processes. As soon as it is technically possible and sometimes also financially profitable, companies tend to mechanize handling in order to reduce the risks of MSDs and work accidents to 0.
In 2017, 55% of workplace accidents were related to load handling activities.
90% of occupational diseases are linked to MSDs. The resulting risks are generally reported in the company’s Single Document and processed over time to tend towards risk 0.
With regards to the handling of heavy loads, the labor code obliges the company to take collective measures which often require the use of lift assist solutions. Thus we will find the classic overhead crane (1 ton and more), the jib crane equipped with hoist (250 kg to 1 ton), or many different load handling solutions. When the rates allow ot, a handling robot is generally used.
But in most cases, the use of means driven by a person is the most common. However, not all means are equal. The weight to be carried, the postures taken to do so and the frequency of repetition are what are called biomechanical factors which, despite the use of mechanized handling means, have an enormous influence on the residual risk of MSDs.
The choice of its load handling system is therefore essential. Here are some key things to consider.
This aspect is critical. Very rare now, work accidents due to the failure of a handling system can put at risk the lives of users and people working in the immediate vicinity of the handling area. The risk is quite often deadly! Equipment sold in Europe are subject to the CE machine directive, which imposes good design, sizing and control practices, according to a set of standards in force.
So, compliance with the Europeane machinery directive for equipment is essential, but this only applies to motorized equipement. Indeed, mechanical equipment only moved by human power is not subject to this directive. It is therefore advisable to always carry out a risk analysis related to the particular use of the lifting equipment envisaged.
It is preferable that this service be carried out by the manufacturer of the handling aid equipement, but it is good that the company’s prevention officers are involved. A CE conformity check is also a possible service to ensure that the equipment complies with Directive 2006/42/CE, also called the Machinery Directive.
Moreover, like all lifting equipment, the equipment once installed must be subject to a lifting compliance check. subject This service must be renewed every year.
Want to know more? INRS published document ED6339 “regulatory verification of lifting devices and equipment” in 2019.
In order to ensure good ergonomics of a workstation or an activity, it is worth asking the question if it is possible to avoid manual handling.
Coming into force in 2009, the NFX 35-109 standard is the reference in France for the ergonomics of load handling.
Its strict application imposes to not exceed 25 kg for a load carried by hand in the best conditions.
The frequency of this handling must be such that a person must not exceed 7,5 tons of cumulative load for 8 hours of work, in the best postures. In practice, it is good to keep in mind that a 15 kg load carried manually every minute, in the best conditions, still represents almost a ton per hour!
Many sectors of activity are therefore concerned by the use of handling assistance means, when the loads exceed 15 kg and the rates are high.
Beyond compliance with the ergonomics recommendations of NFX 35 109, there are also good practices to be aware of, to assess the intrinsic ergonomics of lifting and handling equipment.
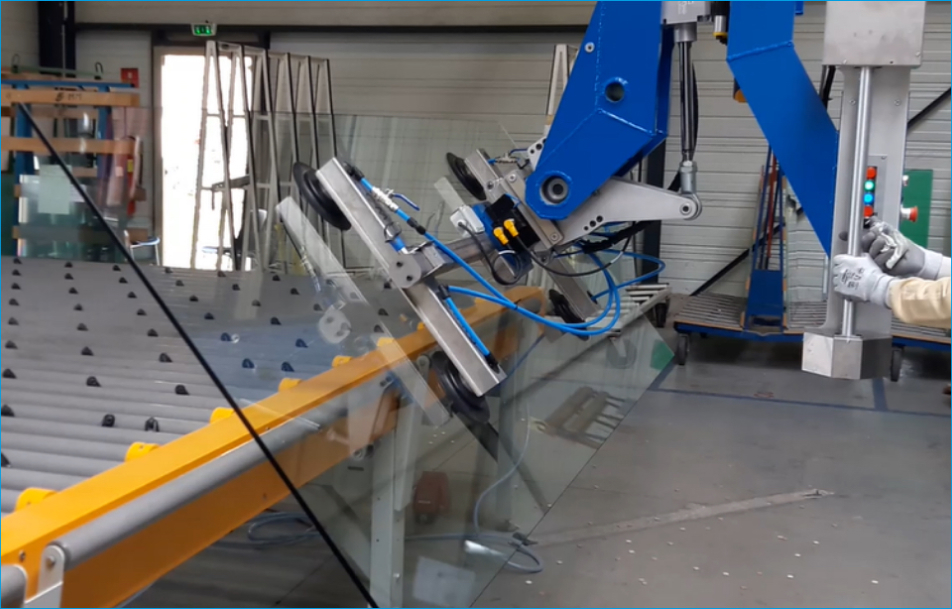
Indeed, the lifting of the load is often assisted by an electric motor or a pneumatic cylinder. On the other hand, the displacement in space of the lifting aid equipment is very often carried out with manual force, for example in the case of rolling beams and jib cranes. It is very rare to find handling aids that are motorized on all their axes like the 4A350.
The efforts to get moving and specially to stop after getting started can be significant and generate risks for the back. Motorized movement and braking as on the 4A350 are guarantees of less effort to avoid back strain or lumbago.
The inertia of the masses (load carried mobile part of the lifting means) in movement complicates and slows down the operation of the means and also causes risks of collission with the environment.
Swaying effect of a load suspended from a cable, for example.
However, the ergonomics of the means of driving the lifting equipment is important to take int account.


For example, it often happens that an operator is found with his arms above his head to hold the steering wheel of a pneumatic balancing manipulator.
Similarly, when attaching or deposing a heavy load at ground level, the need for its correct placement requires you to find yourself leaning or crouching towards the load or the means of picking up the load, which is not ideal.
In addition to the classic equipment (rolling beams, jib cranes, balancing manipulators) found in a large number of production workshops, for several years there has been a new generation of cobotic manipulators called 4A350, allowing ideal ergonomics for all load handling situations.
Many prevention specialists will tell you that shortly after implementing a handling assistance project to reduce MSD risks, the users interviewed complain that the equipment slows them down? Or that the site management has noticed that the equipment is no longer in use?
This is sometimes the case when a manual alternative exists: we will seek the help of the colleague punctually! Of course, there will always be time to regulate the task and to oblige operators to use assistive equipment. When the frequency of handling is not important, wasting a minute to use slow equipment is still acceptable.
But if, as in the automotive industry, one part is produced per minute, every second lost counts and can impact productivity.
Several factors then become predominant:
1/ Inertia: at each start or stop, if the user has to fight with the equipment to drive it, it is a brake on use, and this forces them to make very slow movements. A fully motorized manipulator does not have this disadvantage! We therefore go much faster with it.
2/ Precision : the approach for picking up and/or setting down the load requires precision. Here again inertia comes to call us to order, but moreover we want to avoid untimely or unforeseen movements. This is when a feature onlu allowed by a fully motorized cobotic manipulator is fundamental: guidance assistance is there to help you.
Indeed, to move quickly into position and prevent unwanted movements, it is possible to add a digital layer of guidance assistance over the control of the 4A350 cobotic manipulator.
No more path errors, collisions with just adjacent equipment which, even if nothing is broken, waste seconds or minutes every time!
Thus, the possibility of erasing inertia on the one hand, combined with great driving precision on the other, are the guarantees of optimal productivity.
At RB3D, a cobotic manipulator consists of a support structure to which is attached a gripper that will be used to pick up and hlod the part or parts that you want to move. Given the diversity of parts to be picked up and handled in industry, it is generally necessary to adapt the gripping technology to the needs of the application. We can offer a large number of types of grippers: with suction cups or with mechanical holding, with pneumatic or electric grippers or even with magnets. Our design office has the skills and the technical and safety knowledge to design and produce the gripper adapted to each situation, this service is part of each customer project handled.
We have experience in many gripping technologies. The most common at RB3D is the solution based on grippers which will allow you to take hollow or shaped parts that cannot be taken by vacuum. This also makes it possible to ensure manipulation in the space of the part, because the gripper can make it possible to turn, or even return the part. The great classic for flat products (sheet metal, glass, wood, etc.) is vacuum gripping with different types of suction cups. For our part, we are fervent of venturi suction cups, allowing a higher level of safety in a certain number of cases. But we can also integrate turbine suction cups, in the event that the leakage rate is high.
Different parts of a Type 4A350 cobot may have different levels of protection depending on their exposure to dust or water spray. As a designer manufacturer, we adapt the design to meet at least the standard requirements of the industry: Protection index IP45. But in some projects, we have improved this level of protection in order to be better protected, in particular for certain more exposed sub-assemblies. But in some projects, we have improved this level of protection in order to be better protected, in particular for certain more exposed sub-assemblies.
There is a version of the 4A350 designed to operate in the agri-food industry. Several such devices have been in successful service for a number of years. Galvanized steel posts, anodized aluminum rails and structure, electrical cabinet and stainless-steel gripper are de rigueur in this type of industry. Our design also provides for not having a retention zone and for using food-grade compatible lubricants
